
Robotic Mechanisms – LINKAGES – Simple Planar Linkages 51009
What are Linkages ? Linkage Mechanisms used in Robotics
A mechanical linkage is an assembly of bodies connected to manage forces and movement. The movement of a body, or link, is studied using geometry so the link is considered to be rigid. The connections between links are modeled as providing ideal movement, pure rotation or sliding for example, and are called joints. A linkage modeled as a network of rigid links and ideal joints is called a kinematic chain.
Linkages may be constructed from open chains, closed chains, or a combination of open and closed chains. Each link in a chain is connected by a joint to one or more other links. Thus, a kinematic chain can be modeled as a graph in which the links are paths and the joints are vertices, which is called a linkage graph.
The number of parameters in the subgroup is called the degrees of freedom (DOF) of the joint. Mechanical linkages are usually designed to transform a given input force and movement into a desired output force and movement. The ratio of the output force to the input force is known as the mechanical advantage of the linkage, while the ratio of the input speed to the output speed is known as the speed ratio. The speed ratio and mechanical advantage are defined so they yield the same number in an ideal linkage.
A kinematic chain, in which one link is fixed or stationary, is called a mechanism, and a linkage designed to be stationary is called a structure.
Types of Linkages
A linkage is a mechanism formed by connecting two or more levers together. Linkages can be designed to change the direction of a force in robotics or make two or more objects move at the same time. Many different fasteners are used to connect linkages together yet allow them to move freely such as pins, end-threaded bolts with nuts, and loosely fitted rivets.
Linkages are capable of performing tasks such as describing straight lines or curves and executing motions at differing speeds. The names of the linkage mechanisms given here are widely but not universally accepted in all textbooks and references. Linkages can be classified according to their primary functions:
• Function Generation: the relative motion between the links connected to the frame
• Path Generation: the path of a tracer point
• Motion Generation: the motion of the coupler link
There are two general classes of linkages:
-Simple Planar Linkages and
-More Complex Specialized Linkages;
Simple Planar Linkages
Four different simple planar linkages shown in Fig. are identified by function:
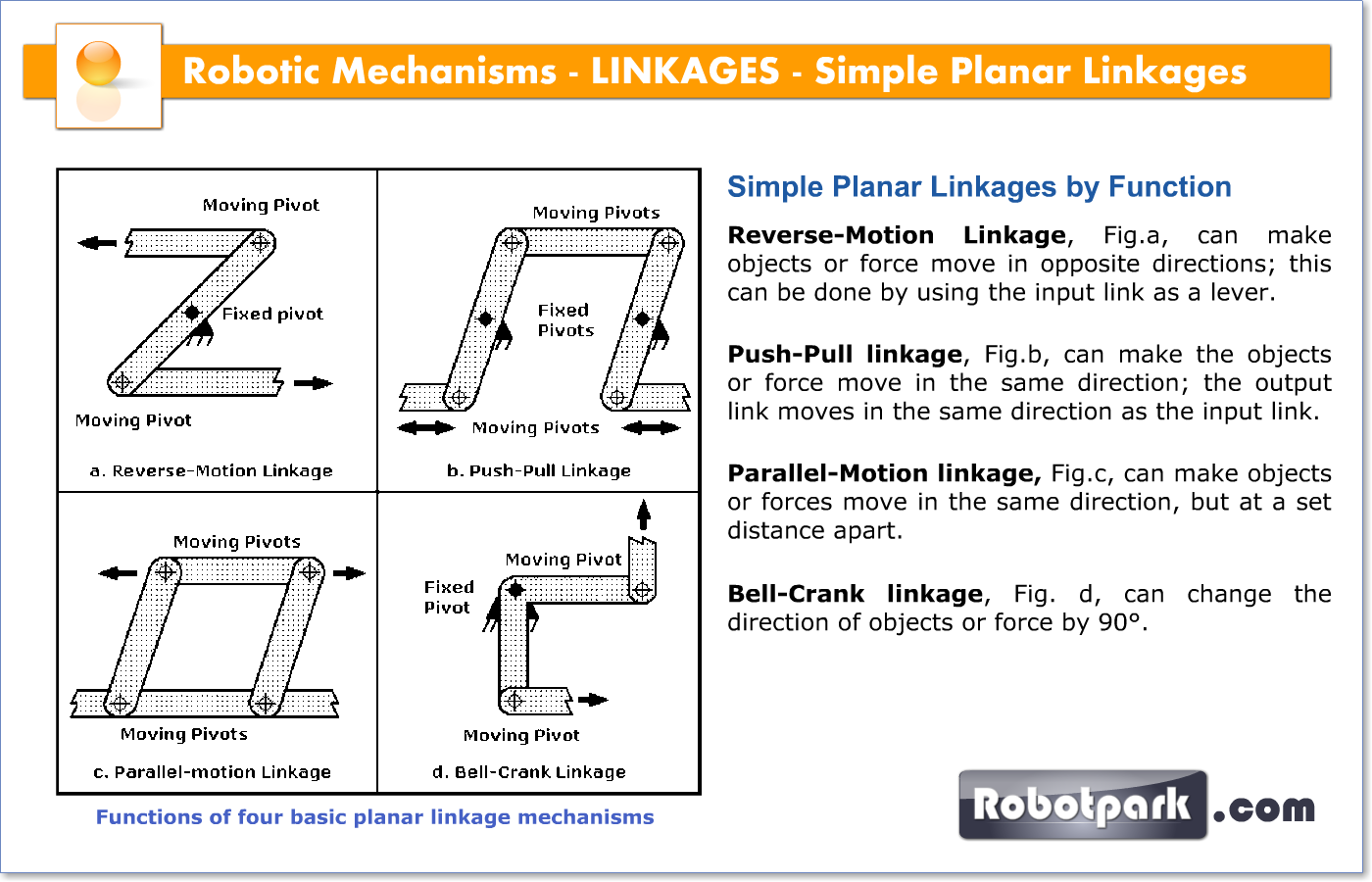
• Reverse-Motion linkage, Fig. a, can make objects or force move in opposite directions; this can be done by using the input link as a lever. If the fixed pivot is equidistant from the moving pivots, output link movement will equal input link movement, but it will act in the opposite direction. However, if the fixed pivot is not centered, output link movement will not equal input link movement. By selecting the position of the fixed pivot, the linkage can be designed to produce specific mechanical advantages. This linkage can also be rotated through 360°.
• Push-Pull linkage, Fig. b, can make the objects or force move in the same direction; the output link moves in the same direction as the input link. Technically classed as a four-bar linkage, it can be rotated through 360° without changing its function.
•Parallel-Motion linkage, Fig. c, can make objects or forces move in the same direction, but at a set distance apart. The moving and fixed pivots on the opposing links in the parallelogram must be equidistant for this linkage to work correctly. Technically classed as a four-bar linkage, this linkage can also be rotated through 360° without changing its function. Pantographs that obtain power for electric trains from overhead cables are based on parallel-motion linkage. Drawing pantographs that permit original drawings to be manually copied without tracing or photocopying are also adaptations of this linkage; in its simplest form it can also keep tool trays in a horizontal position when the toolbox covers are opened.
• Bell-Crank linkage, Fig. d, can change the direction of objects or force by 90°. This linkage rang doorbells before electric clappers were invented. More recently this mechanism has been adapted for bicycle brakes. This was done by pinning two bell cranks bent 90° in opposite directions together to form tongs. By squeezing the two handlebar levers linked to the input ends of each crank, the output ends will move together. Rubber blocks on the output ends of each crank press against the wheel rim, stopping the bicycle. If the pins which form a fixed pivot are at the midpoints of the cranks, link movement will be equal. However, if those distances vary, mechanical advantage can be gained.
Simple Planar Linkages in Action
Warning : Flash Animation May not Work on Some Browsers and Mobile Platforms !


