
BIASED SEARCH – 21015
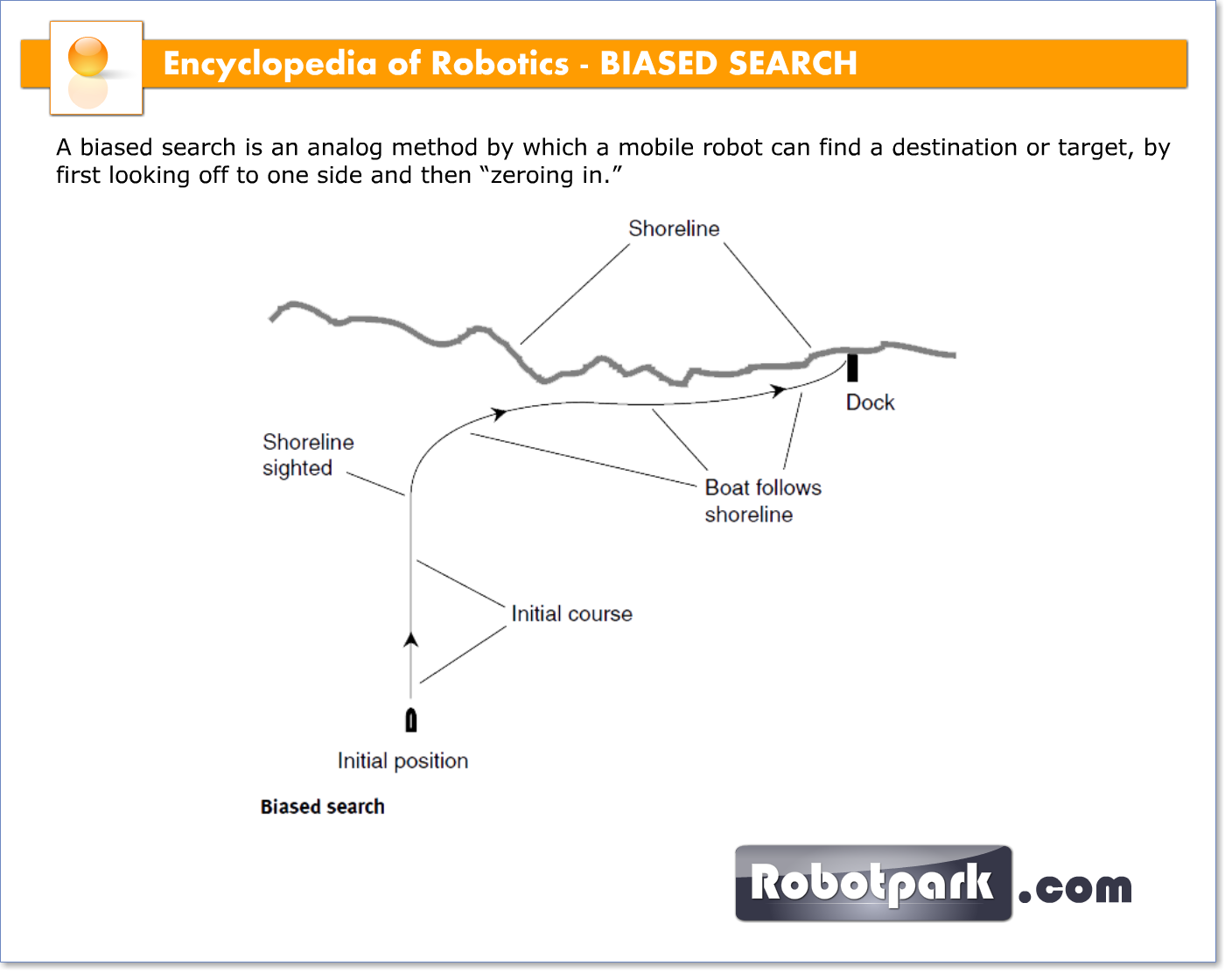
A biased search is an analog method by which a mobile robot can find a destination or target, by first looking off to one side and then “zeroing in.”
The illustration shows a biased-search scheme that a boater might use on a foggy day. At some distance from the shoreline, the boater cannot see the dock, but has a reasonably good idea of where it is. Therefore, an approach is deliberately made well off to one side (in this case, to the left) of the dock.When the shore comes into view, the boater turns to the right and follows it until the dock is found.
For a robot to use this technique effectively, it must have some familiarity with its environment, just as the boater knows roughly where the dock will be. This is accomplished by means of task-level programming, a primitive form of artificial intelligence (AI).


