Simple Mechanical Robotic Leg Design – 11057
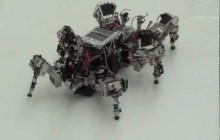
This robotic leg design is usefull for people who finds it hard to walk by himself. This robot is walking without a source of energy (of course it takes power from it’s potential energy) It doesn’t use any kind of motor or control. It is made of aluminum and it contains only mechanical components. The robot has three main parts, upper leg, lower leg and ankles.