MorpHex, sphere sections mounted on legs (2011/7/13)
A new update about my MorpHex project. I didn’t have time to take some good quality pictures because I’m working with some gardening and renovating stuff that occupies my “photo studio”. Some workshop pics with bad lighting was my only option last evening/night.
Anyway, I’ve been very eager to get the lower sphere sections mounted onto the legs. So eager that I selected a rather easy way by using some counter sink white nylon screws. I’m planning to use three screws on each sphere part and mount it to the ASB-04 tibia bracket. So far I’m using only two for testing. It was a bit tricky to align the hole for drilling, so I used a LED as a lamp behind the sphere part:
Btw, I’m also planning to reinforce each sphere part. I did just a simple test, the final result will be better. The plastic material is Poly Carbonate. By mounting ribs on each side the part gets more rigid, the rib also make sure that the neighbor leg/sphere part doesn’t overlap each other in sphere mode.


Fully extended body (below left) – Ready for transforming into sphere mode (below right)

Transforming:


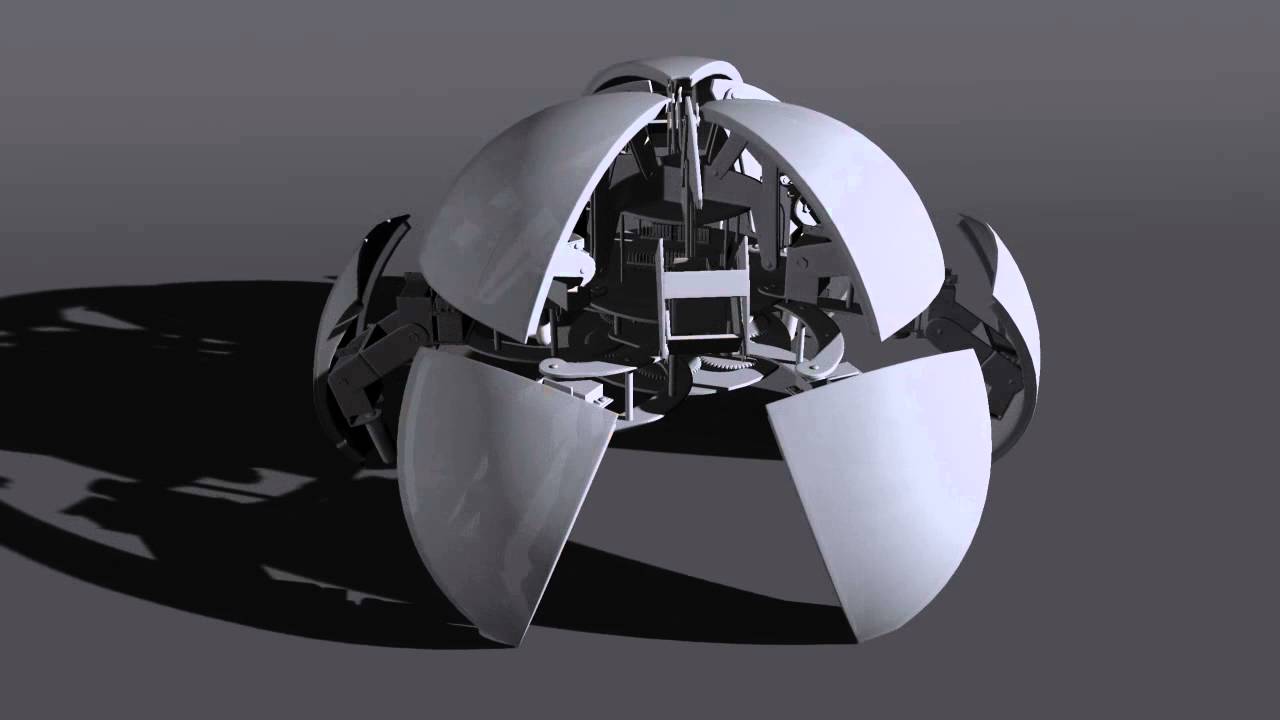
Sphere mode!  As you can see there are some small adjustments to do, and I’ve already done some improvements today to get them even better aligned. but so far, so good.
As you can see there are some small adjustments to do, and I’ve already done some improvements today to get them even better aligned. but so far, so good.


Normal body height for walking, the legs have very much free space for moving around without any conflict.

MorpHex, the upper sphere sections (September 13 2011)
Its been a while since I last got some time for working on this project. But luckily I’ve had some time now and then for working on the upper sphere sections. I mentioned earlier that I’m using only six servos for controlling the six upper sphere sections. This mean that each sphere section only have 1 DOF of movement. If each sphere section where coupled together with a simple joint/hinge at the top center of the upper sphere half they wouldn’t be able to move at all or at least not at the same time. That’s because of several mechanical obstructions between the sphere sections. So I had to figure out a mechanical hinge solution that made the sphere section translate a little away from the top center before it could swing out and upward (bad english.. sight). I hope you get what I mean.

Anyway, pictures tell much more that any words. All parts are handmade, the material is polycarbonate. Here are some pictures of the hinge system:
The hinge-system are going to be placed above the ARC-32 board. Another picture of the hinges in the max/fan position:
This picture illustrate how the sphere sections are going to be mounted to the hinge-system
Just for the fun of it I’ve placed the upper sections loosely on top of MorpHex just for giving you an image of how it will be at the end:
As you can see, the sphere parts does deflect a little under load, but hopefully its not going to be a problem. I’ll probably need to make sure there is a little gap between the upper and lower sphere sections:
I’ll come back with more info on how I’ll attach the servos. At the moment I’m also very curious to see how it will perform when the upper sections are mounted. It will add about 1,2 kg extra load. Earlier I did some testings and it seemed to perform ok with the extra load. The extra load was 3 beefy 3S LiPo’s :
MorpHex, update on the upper sphere sections (September 18 2011)
The upper sphere sections are now mounted onto the hinge/linkage system.
So today I took some more pictures with a darker background for better contrast, do I need to say more..
I believe having an upper section that can take different shapes might be a cool feature in walking mode.