
MorpHex Project – Morphing Hexapod – By Kåre Halvorsen – 81020
DESIGNED BY :
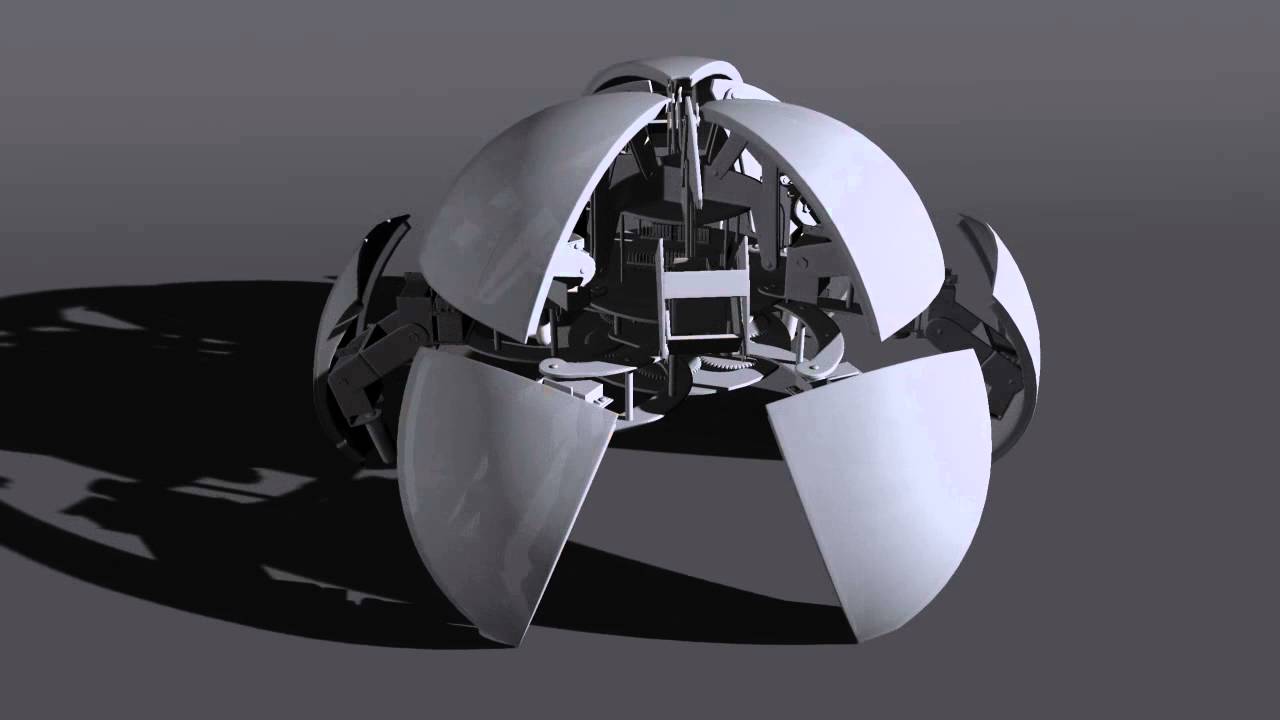
MorpHex video part III (April 2 2012)
I’ve just made a new video of MorpHex for demonstrating the rolling feature. One thing you may notice is that MorpHex rolls more or less in a curved direction instead of a straight forward direction. This is caused by the asymmetric design; the upper sphere section vs. the lower section. I’m about to get my hands on some more of those high torque servos and I’m thinking of making MorpHex more symmetrical again. Actually, that was my original plan:
Morphex III Becomes Boca Bearing Company’s Innovation Contest Winner (January 2 2013)
A few days ago I got the great news from the Boca Bearings company that my contest entry won their grand prize! More information about the contest results can be found here. I do feel very honored for getting a prize like this. I’m also very humble thinking of all the other great projects that was submitted to contest. One of my favorite projects was the human powered helicopter, a very impressive achievement indeed.
As you may have noticed I’ve not had much time for updating my blog lately, its mostly caused by little free time. When it comes to the MorpHex project I’ve done some progress on the next version of MorpHex, called MorpHex MK2. Or maybe I should call it Mark 3.. You see, I’ve had a few setbacks lately. I earlier mentioned that I would try to go for a fully symmetric version and using a completely different leg design. I did some progress on that attempt, but after a while I realized that it wouldn’t work under one critical condition; transforming from ball to hex. Here is a rather low quality picture of a very different coxa with dual femurs I made under this attempt:

After a lot of thinking I came to a decision of going for an asymmetric design again. To be honest I don’t think a symmetric version of MorpHex would be very appealing. You see, a symmetric design mean that the upper and lower leg sections share the same coxa servo. So when walking the upper sections always need to follow the lower legs. An asymmetric design where the upper section can keep the half sphere shape is something I really liked with the first version. So this time the I’m going for an upper section with 2 DOF. I do hope this will work better.
So far I’m still working on assembling the lower leg sections. I’m using a slightly different coxa design (don’t have any pictures ready for that yet) and a tibia bracket that are going to make the sphere sections much stronger. A picture of some the new brackets here:

There are still a lot of work left when it comes to hardware assembling, calibration and programming.
Again, I want to thank Boca Bearing for the very generous prize! Hopefully many more robots come in the future.
-Zenta, “Having fun with robots“.
ABOUT THIS PROJECT
Tell us briefly about your project. Is it a work of art or does it serve another function?
MorpHex is mostly a work of art and goes in the category of hobby robotics. It’s a remotely operated robot. I believe it could be used in animatronics as a transforming robot as well.
When did you start working on this project and how long did it take you to complete?
I started working on this project around August 2010 and I’m still working on it.
What was your goal in building this project?
The main goal of this project was to make a hexapod robot that could transform into a sphere shape and back. In “sphere mode” the robot should be able to roll freely like a ball.
Does your project help to solve a problem? If so what problem?
MorpHex demonstrate the challenge of transformation in real world. In almost every science fiction movie computer graphics are used to animate transforming robots. This project solves this problem for real!
What makes your idea unique?
A robot that is able to walk with legs and transform into a perfect sphere shape and roll like a ball is very unique. There has been made a lot of walking robots and remotely operated balls but not a robot that combines these two features (as far as I know).
In what capacity are you using bearings and what type of bearings?
I’m using 36 ball bearings (od 8, id 3 and w 4mm) with flange. 12 of the bearings in the body core play a key role keeping the robot in one piece. There are also bearings in each of the 25 servos.
What is the most important thing you want people to know about your project?
That robotics is fun and very challenging. I know that MorpHex and my other hobby robotics projects will inspire many people to study robotics or start making their own robots.
How will you use the $10,000 prize?
To make more advanced robots. I would also like to invest in a CNC machine; so far I’ve made most of the custom parts by hand.
More Info : http://www.lynxmotion.net/viewtopic.php?f=20&t=6846



