Linkages – Watts Straight Line 51016
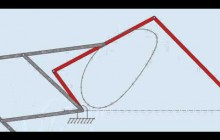
Watt’s straight-line generator, can describe a short vertical straight line. Equal length links AB and CD are hinged at A and D, respectively. The midpoint E of connecting link BC traces a figure eight pattern over the full mechanism excursion, but a straight line is traced in part of the excursion because point E diverges to the left at the top of the stroke and to the right at the bottom of the stroke. This linkage was used by Scottish instrument maker, James Watt, in a steam-driven beam pump in about 1769, and it was a prominent mechanism in early steam-powered machines.